
Aerial Robots for Inspection and Monitoring
Our goal is to automate the process of building and infrastructure construction monitoring. The purpose of construction monitoring is to provide construction practitioners—owners, contractors, subcontractors, and tradesmen—with the information they need to easily and quickly make project control decisions. These decisions have a direct impact on the overall efficiency and safety of a construction project. Our work in particular is driven by the hypothesis that construction cost, delivery time, and environmental impact can be significantly reduced—and safety and productivity can be maximized—with tools that better characterize the extent to which construction plans are being followed (progress monitoring and quality control), and understanding the reasons for performance inefficiencies (activity analysis). Our approach is to derive this information by analysis of images and video streams that are provided by aerial robots with onboard cameras.
PAPERS
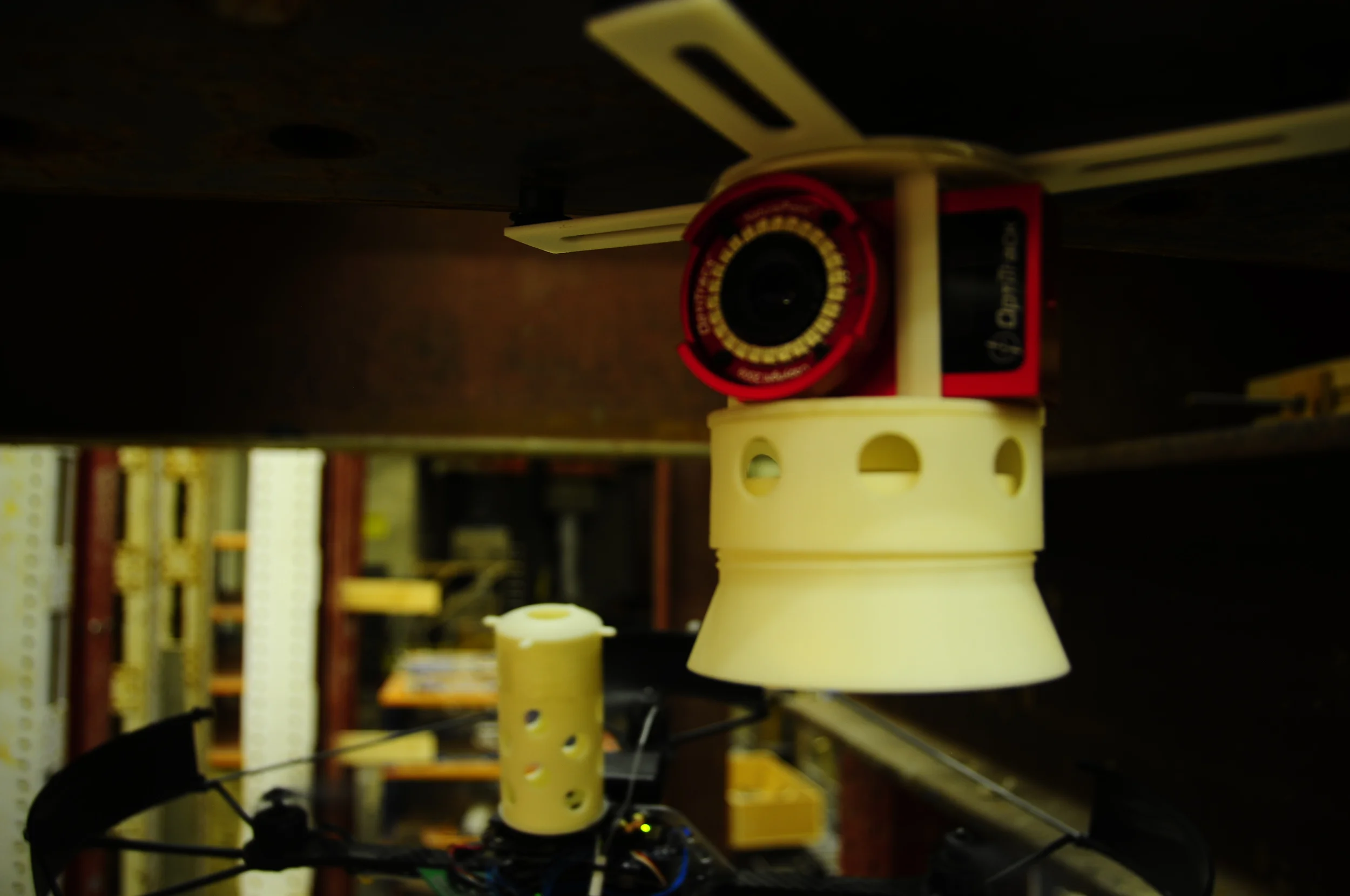
A Passive Mechanism for Relocating Payloads with a Quadrotor
We present a passive mechanism for quadrotor vehicles and other hover-capable aerial robots based on the use of a cam-follower mechanism. This mechanism has two mating parts, one attached to the quadrotor and the other attached to a payload. These two parts are joined by a toggle switch—push to connect, push to disconnect—that is easy to activate with the quadrotor by varying thrust. We discuss the design parameters and provide an inertial model for our mechanism. With hardware experiments, we demonstrate the use of this passive mechanism to autonomously place a wireless camera in several different locations on the underside of a steel beam. Our mechanism is open source and can be easily fabricated with a 3D printer.
[Link] [Paper] [Slides] [Video] [STL Files]